| | | | | |
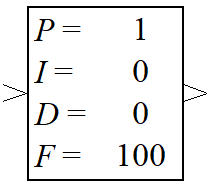
Обозначение
Описание| Блок предназначен для реализации пропорционально-интегрально-дифференцирующего (ПИД) регулятора. |
РедактированиеДвойной щелчок левой кнопкой мыши по элементу активирует режим редактирования. Необходимо записать соответствующие значения пропорционального P, интегрального I, дифференцирующего D регулятора с коэффициентом фильтра F. Параметр F вводится для обеспечения физической реализуемости динамического звена, т.к. порядок числителя в большинстве случаев превышает порядок знаменателя. Величина F обычно соответствует обратной величине шага решения, заданного в нижней панели на вкладке "SIM".
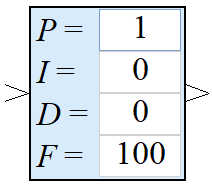
Для того, чтобы задать тип ПИД регулятора, такой как ПД или ПИ, необходимо щелкнуть на поле для ввода параметра P и на дополнительной панели инструментов щелкнуть на первую кнопку, соответствующую текущему типу регулятора.
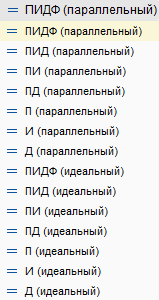
Отличие параллельного типа от идеального типа состоит в том, что при параллельном подключении сигналы с блоков P, I/s и Ds складываются, а в идеальном - коэффициент P является коэффициентом усиления всей цепи. Таким образом, результирующий сигнал будет равен P(1+I/S+Ds). |
Автоматическая настройка коэффициентов (PID Tune)Для автоматической настройки коэффициентов необходимо выделить ПИД-регулятор на схеме и на панели инструментов нажать на кнопку "ПИД Тюнер".

В нижней панели программы появится вкладка для настройки ПИД-регулятора.
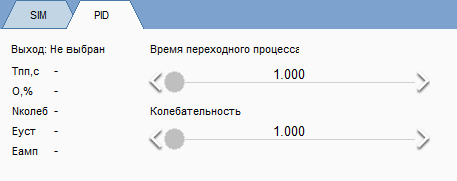
Регулируя отметки "Время переходного процесса" и "Колебательность" и наблюдая за выходным сигналом системы имеется возможность автоматически настроить параметры ПИД регулятора.
Для получения характеристик выходного процесса (время переходного процесса, перерегулирование, число колебаний, установившаяся ошибка, амплитуда колебаний) необходимо выделить передаточную функцию системы, соответствующую выходу системы и на вкладке "PID" нажать на кнопку "Выход: Не выбран".
При выделении объектов на рабочем листе автоматическая настройка ПИД-регулятора запрещается, поэтому перед работой на вкладке "PID" необходимо вновь выделить ПИД регулятор на схеме. |
| |
| |